Problème:
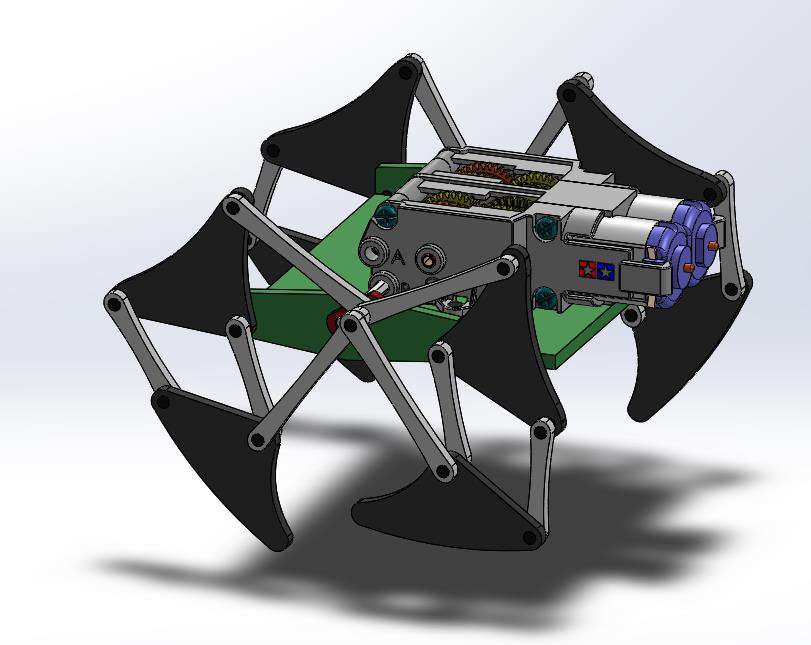
A partir d'un motoréducteur tel que ci-après, l'objectif est de réaliser un robot marcheur ( roues interdites )

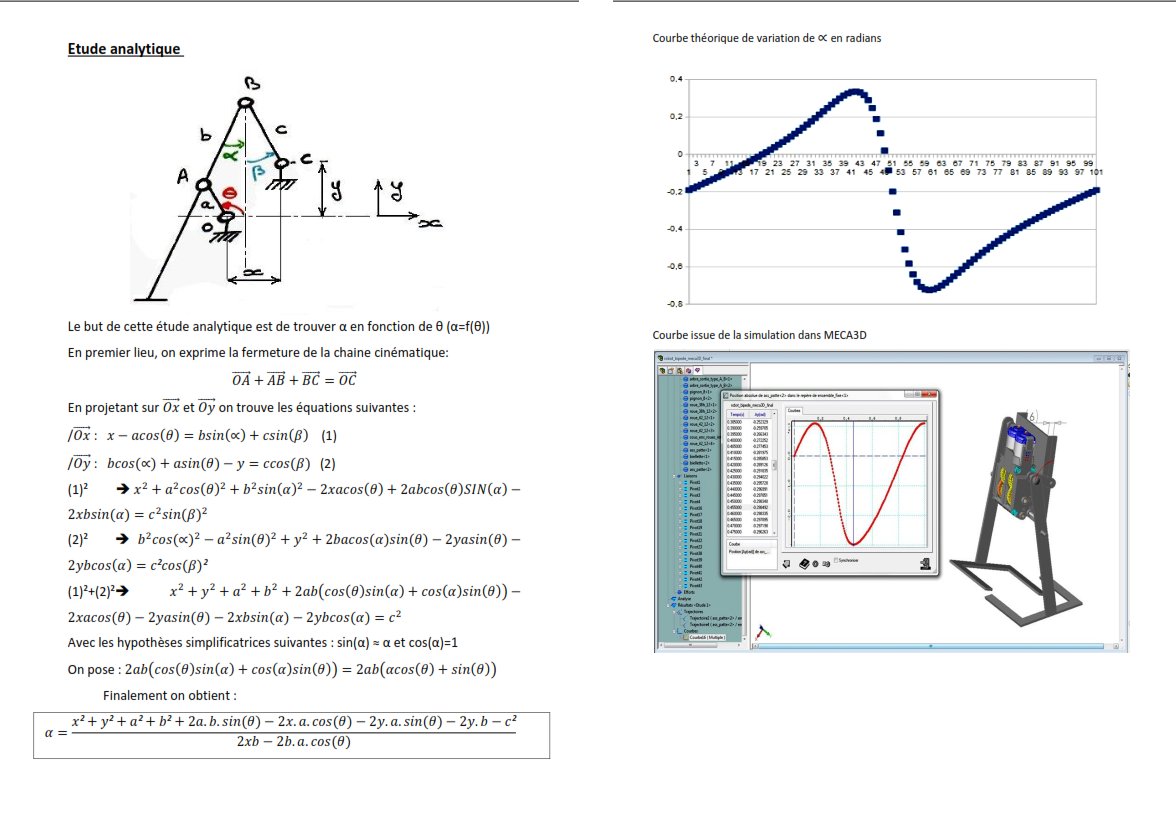
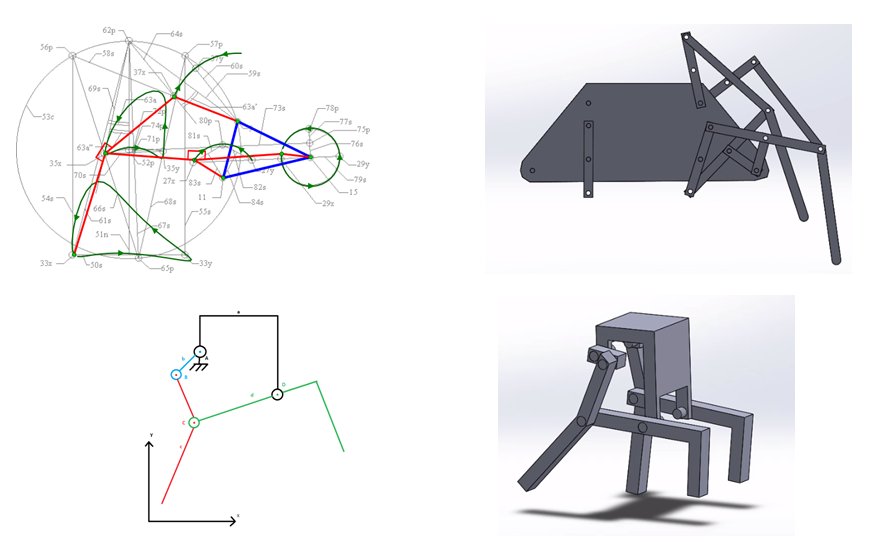
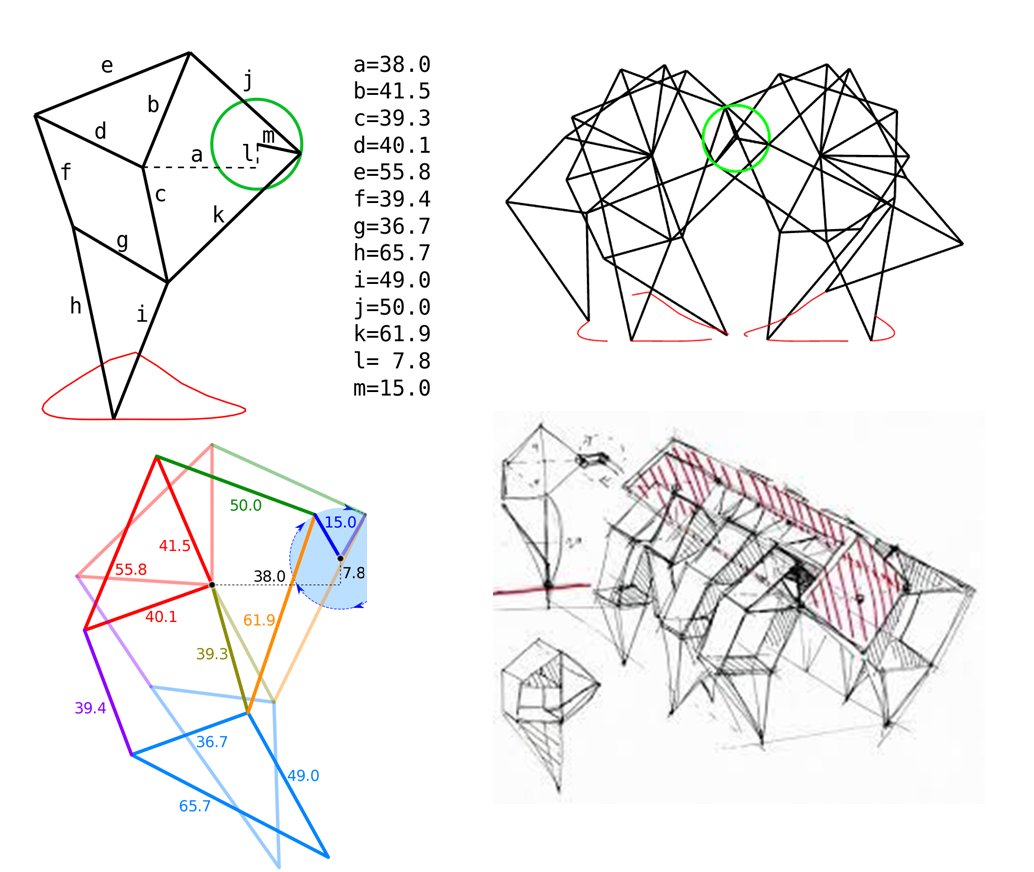
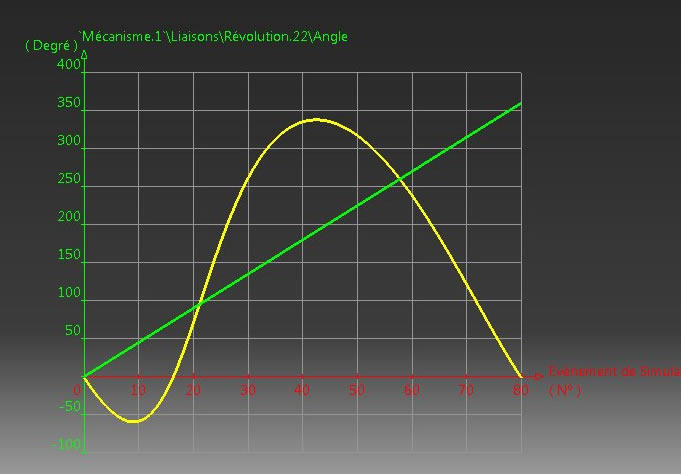
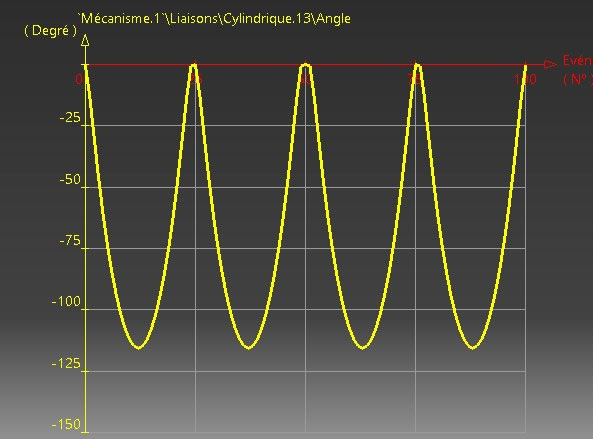
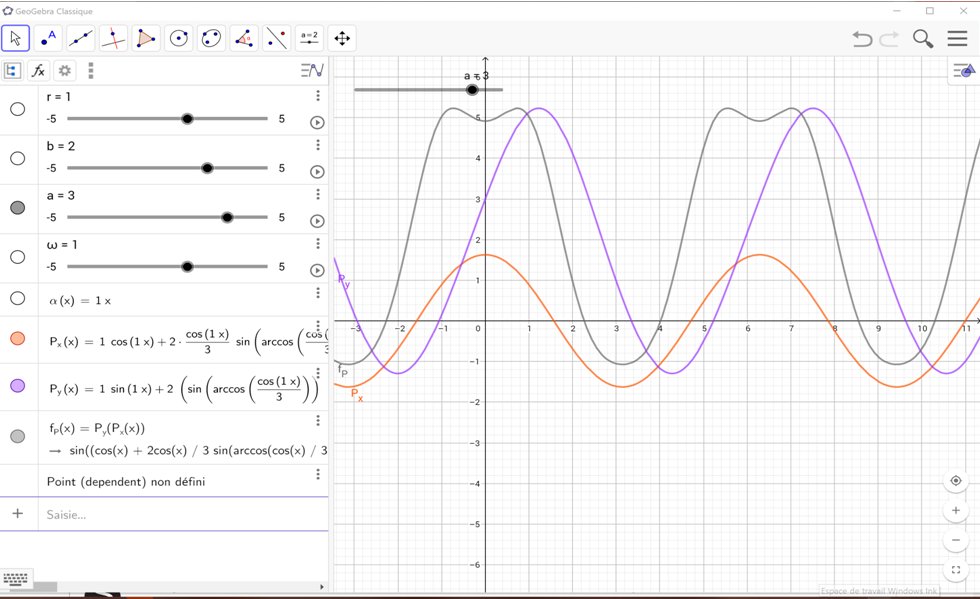
IL faut d'abord rechercher des systèmes permettant d'obtenir le mouvement alternatif des jambes à partir d'un mouvement de rotation continu.
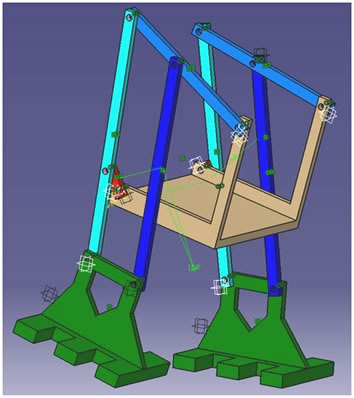
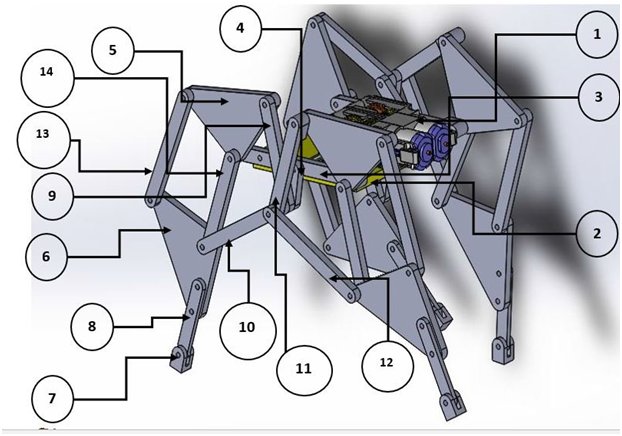
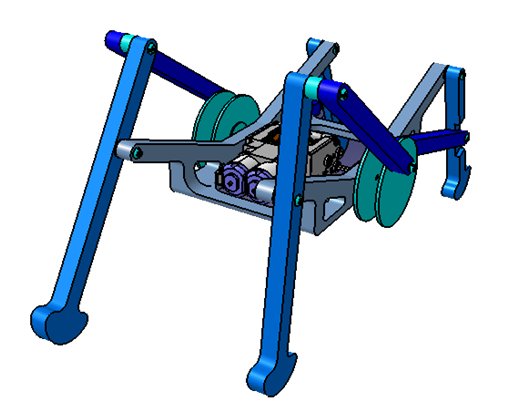
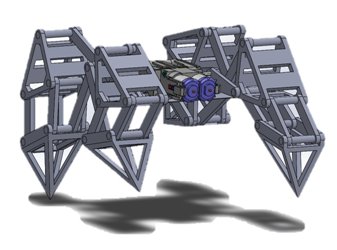
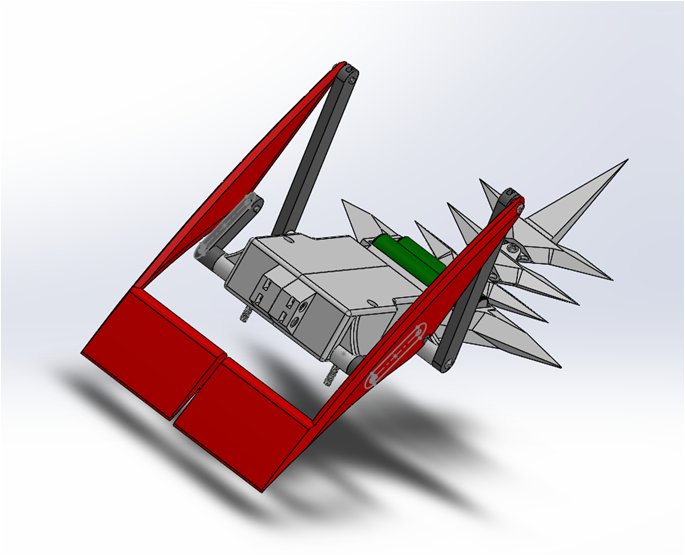
Pour cela, des prototypes du système de transformation de mouvement ont été réalisés en carton afin de vérifier la cinématique du système. Ensuite, une fois que la cinématique du système choisi a été validée, les pièces sont réalisées en impresssion 3D Une fois le robot assemblé il arrive parfois que le robot ne fonctionne pas comme cela était prévu ( problèmes d'équilibre, de frottements des pièces tournantes, de masse trop importante des pièces en mouvement ...) Il faut alors analyser la cause du problème et rechercher une solution appropriée, ce qui n'est pas toujours une tâche aisée.
Cela dit ,ce travail est une source d'une réelle créativité, comme peuvent le montrer les images ci-après de quelques réalisations.