Projet Pluritechnique
( en collaboration avec Mrs Dupuits, Hamon et Mathieu )
LE THEME
Quatre robots se rencontrent au cours d’un jeu de collecte de balles.
Le but du jeu est de ramener le plus de balles de ping-pong dans son enclos, avant les 3 minutes limites.
Au départ, les balles sont situées dans un enclos central

Principaux problèmes à résoudre
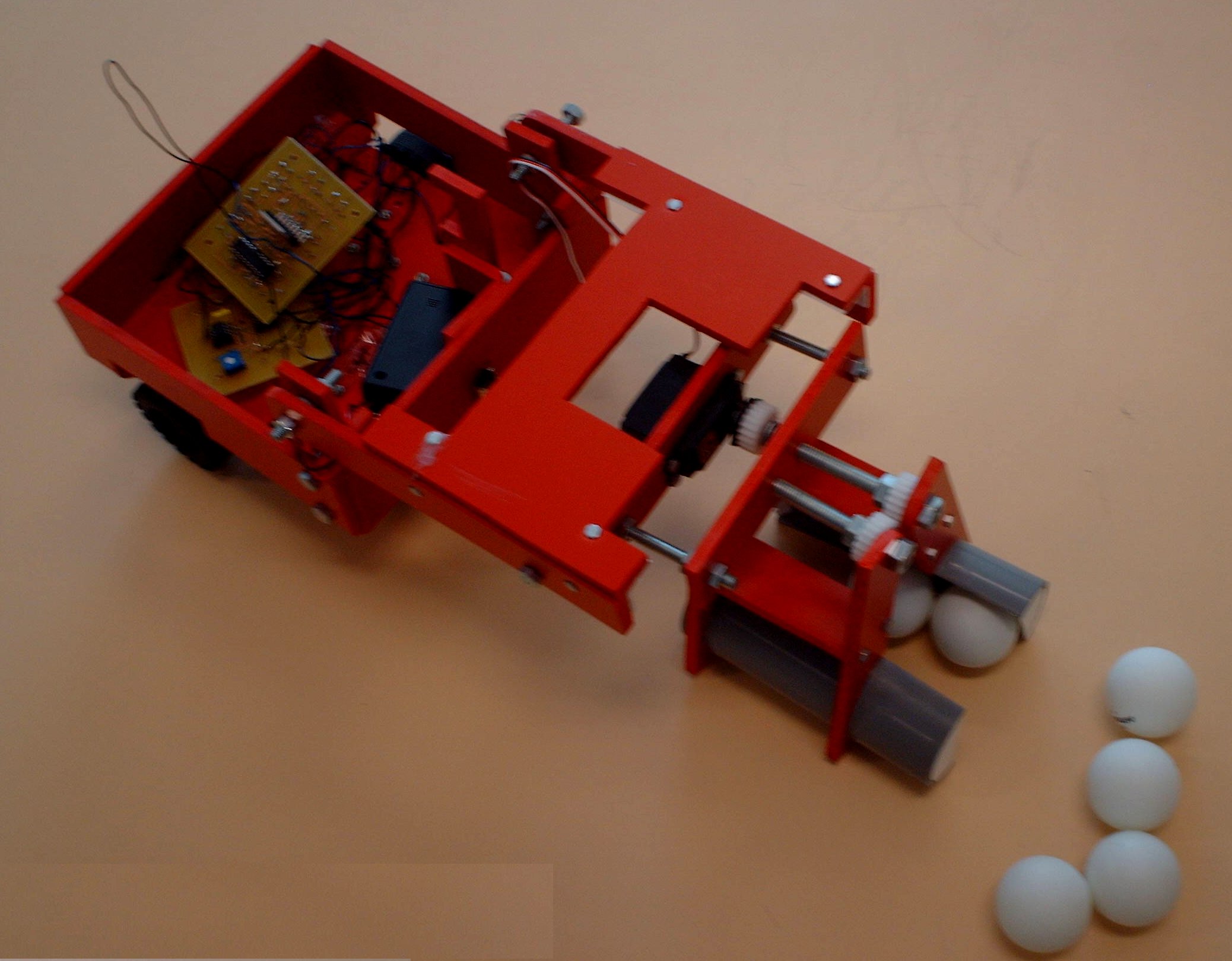
Se déplacer en toute autonomie
Le robot doit être complètement autonome dans son déplacement .
Pour suivre la ligne,le robot est équipé de capteurs optiques qui sont gérés par un microcontrôleur.
Le microcontrôleur a été progammé pour obliger le robot à suivre la ligne
Fonctions de service :
FS1 : S’adapter à la source d’alimentation en énergie
FS2 : Suivre la ligne
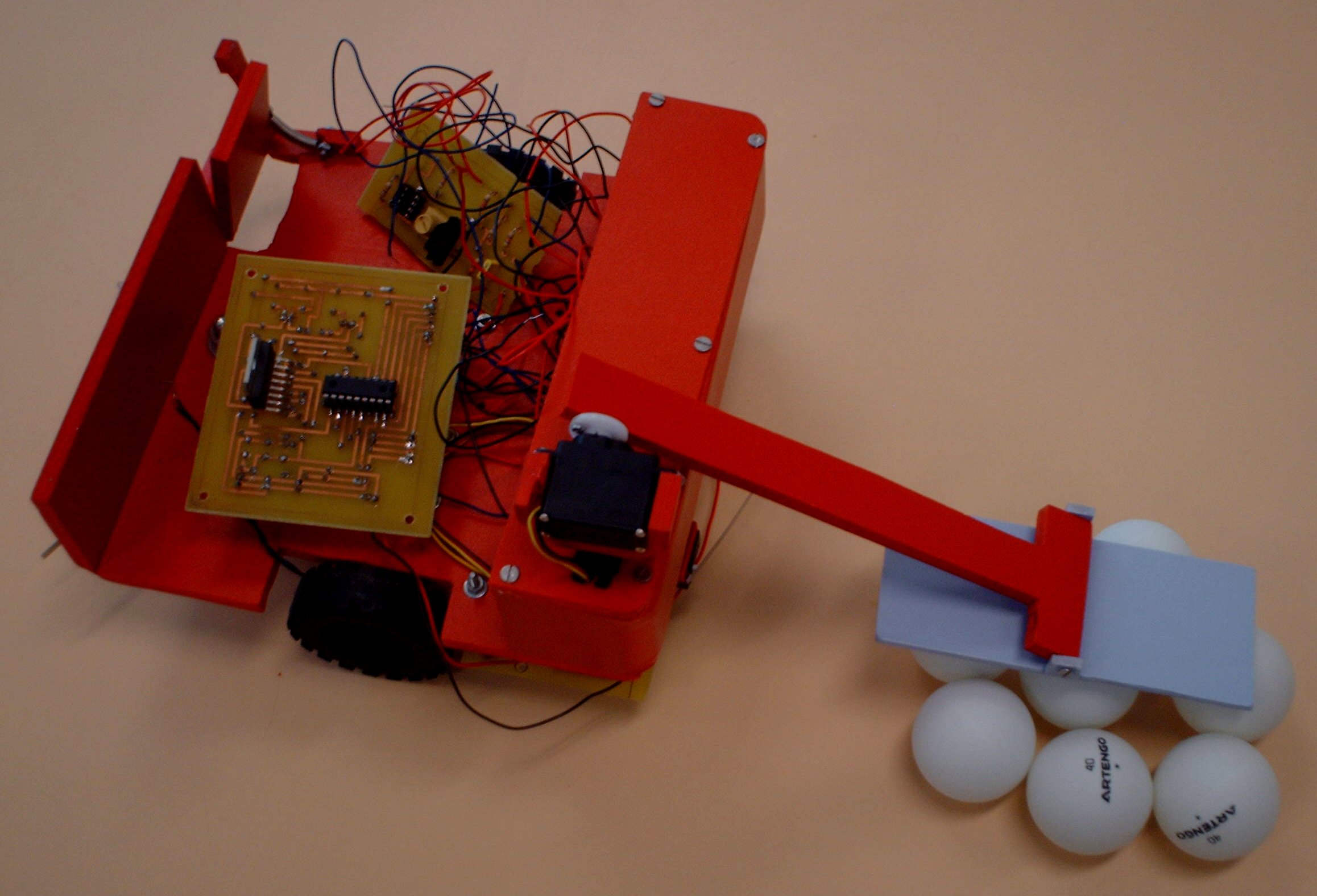
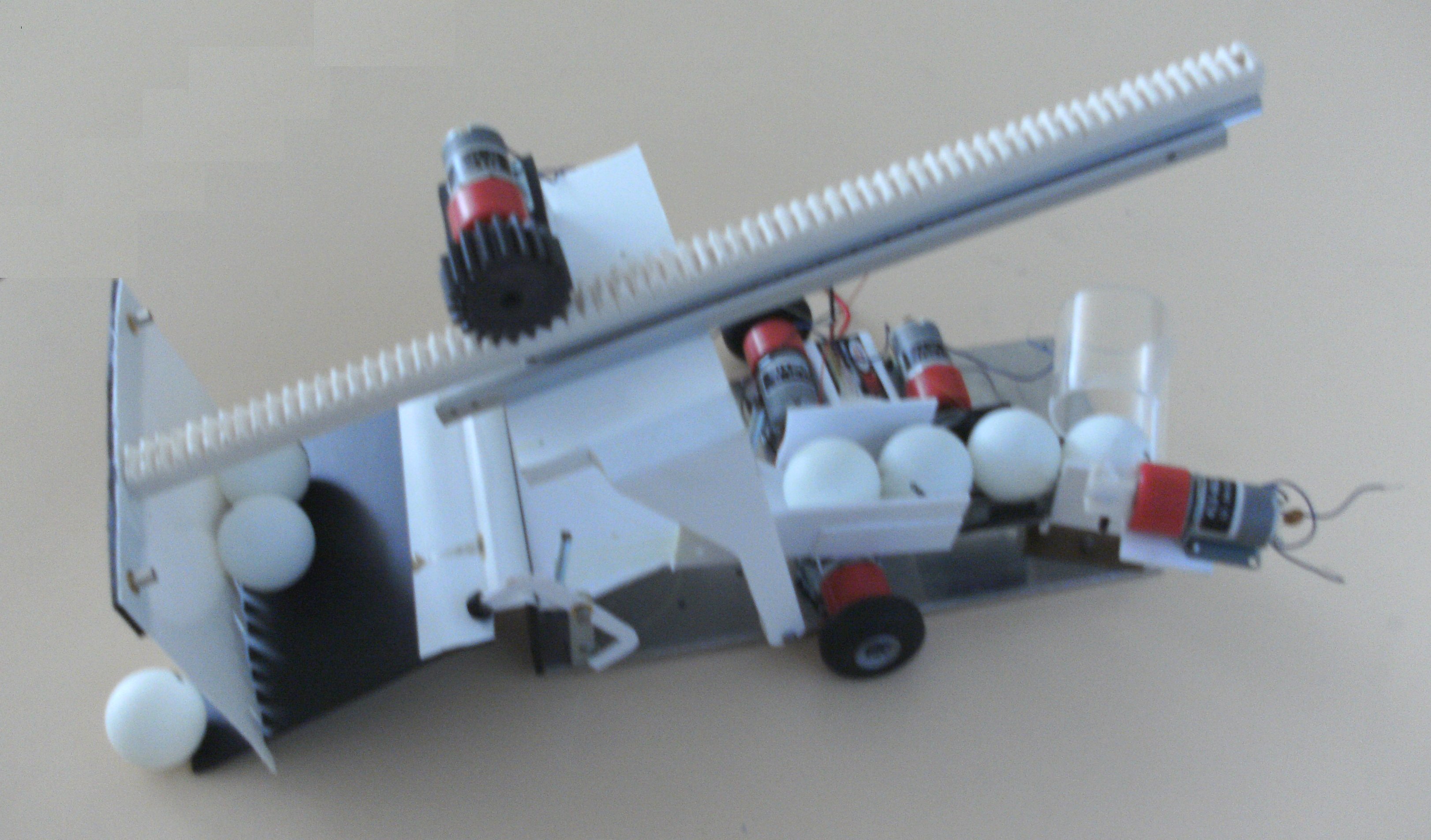
FS3 : Prendre les balles
FS4 : Se déplacer
FS5 : Etre autonome
FS6 : Déposer les balles
FS7 : Démarrer et s’arrêter à des endroits définis.
FS8 : Collecter les balles
FS9 : Stocker les balles
FS10 : Détecter l’enclos
FS11 : Respecter les normes